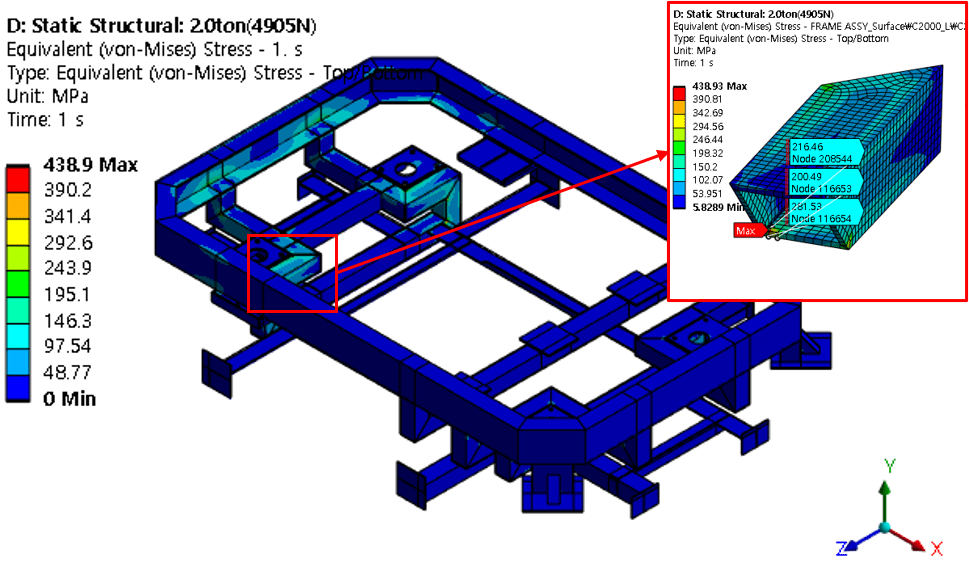
当社の技術力 아이엠로보틱스의 원천 기술력 自律走行搬送ロボットのソフトウェア開発、機構および電気電子設計、シミュレーション制作など、アイエムロボティックスが直接作業します。 ソフトウェア開発 自律走行搬送ロボットの必須条件の中でも最も重要な自律走行アルゴリズムを、当社が自ら開発して使用しています。また、当社が開発した管制システムでは、リアルタイムでの複数ロボットの管制、物流シミュレーション、自律走行のマッピング画面などを確認できます。 自律走行搬送アルゴリズム ネットワークインターフェース 管制システム 機械設計および解釈 自律走行搬送ロボットおよび多関節ロボットの精度や許容可能な重量を正確に把握するため、ロボットの機械・機構解析を必ず行います。 自律走行搬送ロボットおよびアプリケーション設計 機構解釈 電気・電子設計 自律走行搬送ロボットが動作するための中心となる電子回路を自社で直接設計・制作します。制作された回路を基に制御基板を製作し、3Dモデリングを通じて厳密に検討した後、直接制御基板のテストを行います。 電子回路 制御基板 와이어 하네스 자율주행로봇의 내부에 들어갈 배선의 회로 설계를 직접 합니다. シミュレーション 当社では、自動化ソリューションの提供に先立ち、自律走行搬送ロボットおよび多関節ロボットのソリューションシミュレーションを提供しています。実際のロボットの作業速度を反映させて、お顧客様が必要とするソリューションを事前に確認できます。これにより、ソリューションに最適なロボットの選定、サイクルタイムの分析、製造量の予測などが可能となり、作業効率の向上に寄与します。 自律走行搬送ロボット 多関節ロボット自動化